POP-XT ขับมอเตอร์กำลังสูงด้วยบอร์ดขับมอเตอร์ 30A รุ่น EVO24 ตอนที่ 1
6 กันยายน 2013 เวลา 14:14 น.
 บอร์ด POP-XT หรือ Robo Creator ของ inex สามารถขับมอเตอร์ขนาดเล็ก ที่มีการกินกระแสไม่เกิน 600 มิลลิแอมป์ได้ แต่เมื่อต้องการขับมอเตอร์ที่มีขนาดใหญ่ขึ้น จำเป็นต้องเอาวงจรขับมอเตอร์ภายนอกเข้ามาช่วย
บอร์ด POP-XT หรือ Robo Creator ของ inex สามารถขับมอเตอร์ขนาดเล็ก ที่มีการกินกระแสไม่เกิน 600 มิลลิแอมป์ได้ แต่เมื่อต้องการขับมอเตอร์ที่มีขนาดใหญ่ขึ้น จำเป็นต้องเอาวงจรขับมอเตอร์ภายนอกเข้ามาช่วย
บอร์ด EVO24V9.1
ขอแนะนำวงจรขับมอเตอร์รุ่น EVO24V9.1 ของ SMile Robotics คุณสมบัติของวงจรขับมอเตอร์มีดังนี้
- ขับกระแสสูงสุดชั่วขณะได้ถึง 30A
- ขับกระแสต่อเนื่อง 9A ที่แรงดัน 24V
- รองรับแรงดันได้ในช่วง 7-28V
- ปรับความเร็วมอเตอร์แบบ PWM ได้ที่ความถี่ไม่เกิน 5kHz
- มีวงจรป้องกันการจ่ายไฟกลับขั้ว
- มีแผ่นระบายความร้อน
- ตัดการทำงานเมื่ออุณหภูมิสูงกว่า 100 องศา
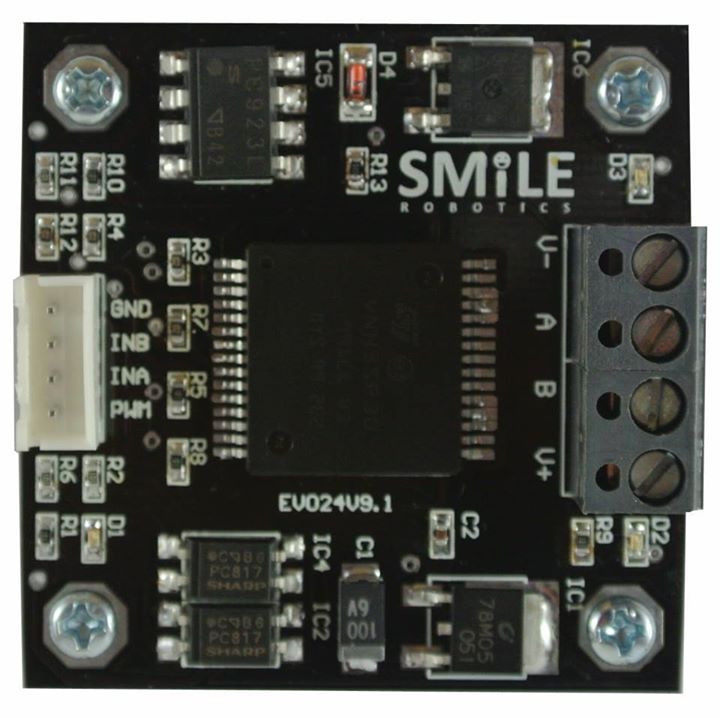
ด้านหน้าของบอร์ด EVO24V9.1

แผ่นระบายความร้อนด้านหลัง EVO24V9.1

รูปแบบการเชื่อมต่อบอร์ด EVO24V9.1 กับ POP-XT

การสร้างวงจรแปลงสัญญาณสำหรับขับมอเตอร์ EV024V9.1

การบัดกรีไดโอดและตัวต้านทานลงบนแผ่นวงจรพิมพ์อเนกประสงค์

หุ้มท่อหดเพื่อความปลอดภัย
ผลลัพธ์ท้ายสุดของวงจรที่สร้างขึ้นก็เป็นดังนี้
วงจรที่เสร็จสมบูรณ์
เมื่อนำทั้งหมดมารวมกันและทดสอบการทำงาน จะได้ผลลัพธ์ดังรูปครับ
ไม่มีความคิดเห็น:
แสดงความคิดเห็น